
www.alignmentforum.org/posts/3SG4WbNPoP8fsuZgs/agency-in-conway-s-game-of-life
Agency in Conway’s Game of Life
2021年5月13日
財務状況 これは独立した研究である。私はこのような更なる投稿を可能にするために財政的支援を歓迎する。
エピステーミックの状態。このような考え方は、何年も前から考えているが、いまだに納得のいくまで解明できていない。
概要
- この投稿では、コンウェイのゲームオブライフにおいて、初期ゲーム状態の小さな領域だけを制御して、あるステップの後にあるゲーム状態が発生するように手配することが可能かどうかを尋ねている。
- この問いに肯定的に答える一つの方法は、コンウェイの「ゲームオブライフ」の中でAIを構築することだからだ。
- AIの許容・不許可は、私たちの物理学の深い特性であると主張する。
- 制御の問題を解決するパターンは、本質的にAIであることによって解決されるという、AI仮説を提案する。
はじめに
今回は、「コンウェイのゲームオブライフ」と呼ばれるセルラー・オートノマについて説明する。
コンウェイのゲーム「ライフ」(以下、「ライフ」と略す)では、2次元のマス目があり、それぞれのマス目はオンかオフのどちらかである。時間の経過とともに、セルは単純なルールに従ってオンとオフの間を切り替えていく。
- 「オン」のセルで「オン」の隣接セルが2つ以下の場合、次の時間ステップで「オフ」に切り替わる
- 「オン」のセルが3つ以上隣接している場合、次の時間ステップで”オフ”に切り替わる
- オフ」で「オン」の隣人をちょうど3つ持つセルは、次の時間ステップで「オン」に切り替わる
- それ以外の場合は、セルは変更されない
この単純なルールは、任意の計算を行うパターンを可能にするほど豊かであることが判明した。論理ゲートを作り、それらを組み合わせて、あらゆるチューリングマシンをシミュレートできるコンピュータを作ることができる。生命の中で作動する普遍的なチューリング・マシンの素晴らしいビデオを見てほしい。
制御に関する質問
例えば、行×カラムのフォーマットである。ここで、このグリッドの左上隅にある×領域のオン/オフの初期設定の制御をあなたに任せ、例えば時間ステップの後にグリッド全体の状態が巨大なスマイリーフェイスにできるだけ近くなるように、その領域の設定をすることを目標にするとする。
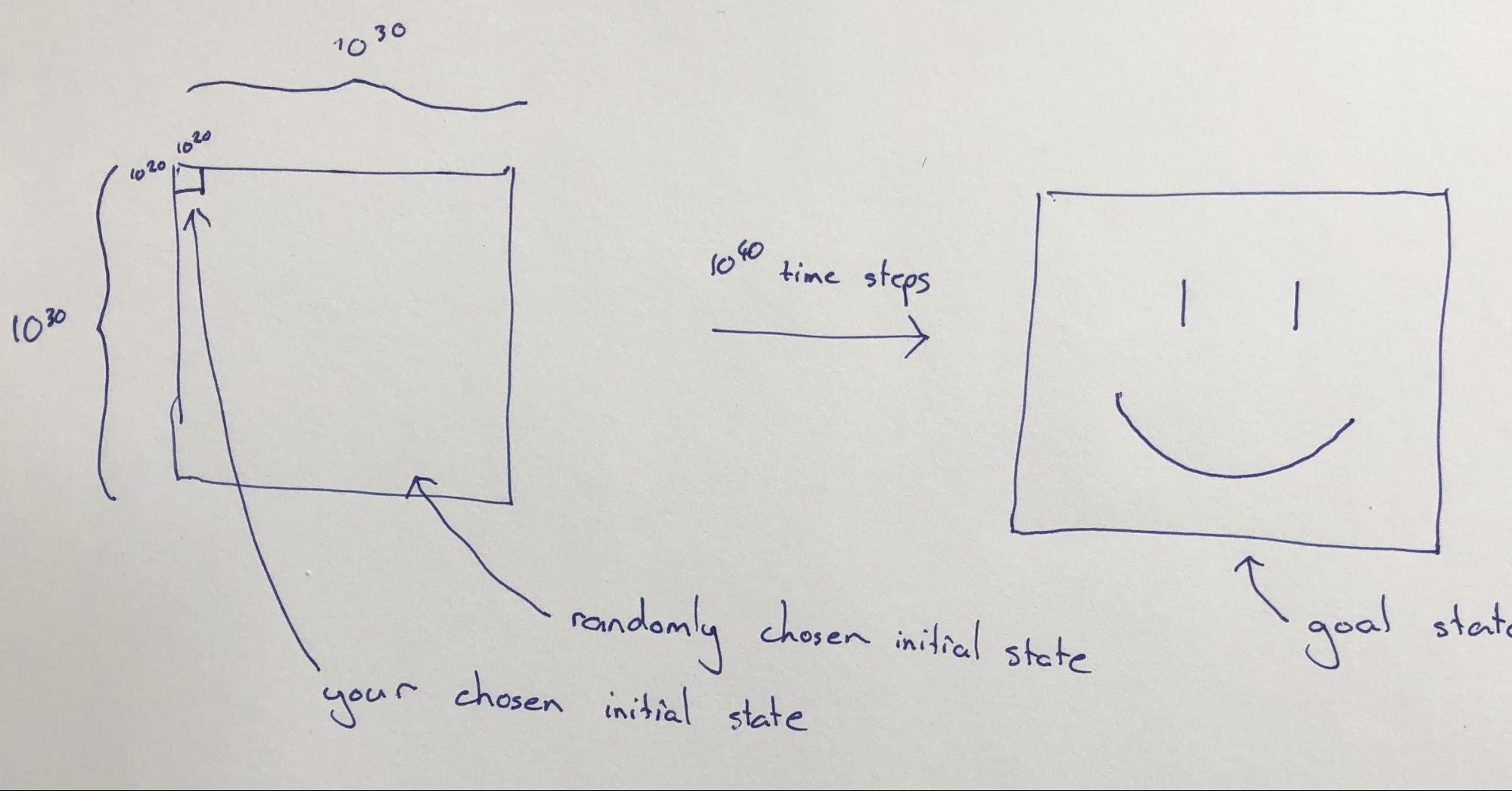
左上隅以外のセルはランダムに初期化され、左上隅の初期構成を決めるときには、その初期構成を見ることはできない。
コントロールの問題は、この目標が達成できるかどうかである。
繰り返しになるが、私たちは生命の法則に従って時間とともに進化していく大きなグリッドの細胞を持っている。私たちは、グリッド全体のごく一部である正方形の領域で、セルの初期オン/オフ構成を制御する力を与えられている。残りのセルのオン/オフの初期設定はランダムに選ばれる。私たちの目標は、制御可能な領域の初期構成を、多くのステップの後に、グリッド全体のオン/オフ構成がスマイリー・フェイスに似るように選ぶことである。
制御上の問題は、この小さな初期領域を使って、最終的にシステム全体の構成を決定するパターンを、合理的な精度で設定できるかどうかということだ。
[コメントでのフィードバックを受けて5/13に更新した]
さて、この質問に対してつまらない否定的な答えを得ることができる方法がいくつかあるので、私たちの表現が制御問題の精神に正対していることを確認するために、少し洗練する必要がある。Richard Kennawayは、制御問題を解こうとするどのようなパターンに対しても、ランダムに初期化された領域には、同じパターンが対角線上の角に180度回転して含まれており、それ以外は空である可能性を考えることができると指摘している。初期状態が対称的である以上、将来の状態もすべて対称的であり、回転対称でないスマイリー・フェイスを作ることは不可能である。より一般的には、チャーリー・スタイナーが指摘するように、ランダムに初期化された領域に、私たちと同じように宇宙全体の最終的な構成を制御しようとするパターンがあるとしたらどうなるだろうか。この問題に対処するために、制御の問題を修正して、ランダムに初期化された領域の少なくとも99%の構成に対して「機能する」パターンを要求するようにしてもよいだろう、なぜなら、その領域のほとんどの構成は敵対的ではないだろうから.以下の簡単な付録でさらに議論を深めてほしい。
エージェンシーとのつながり
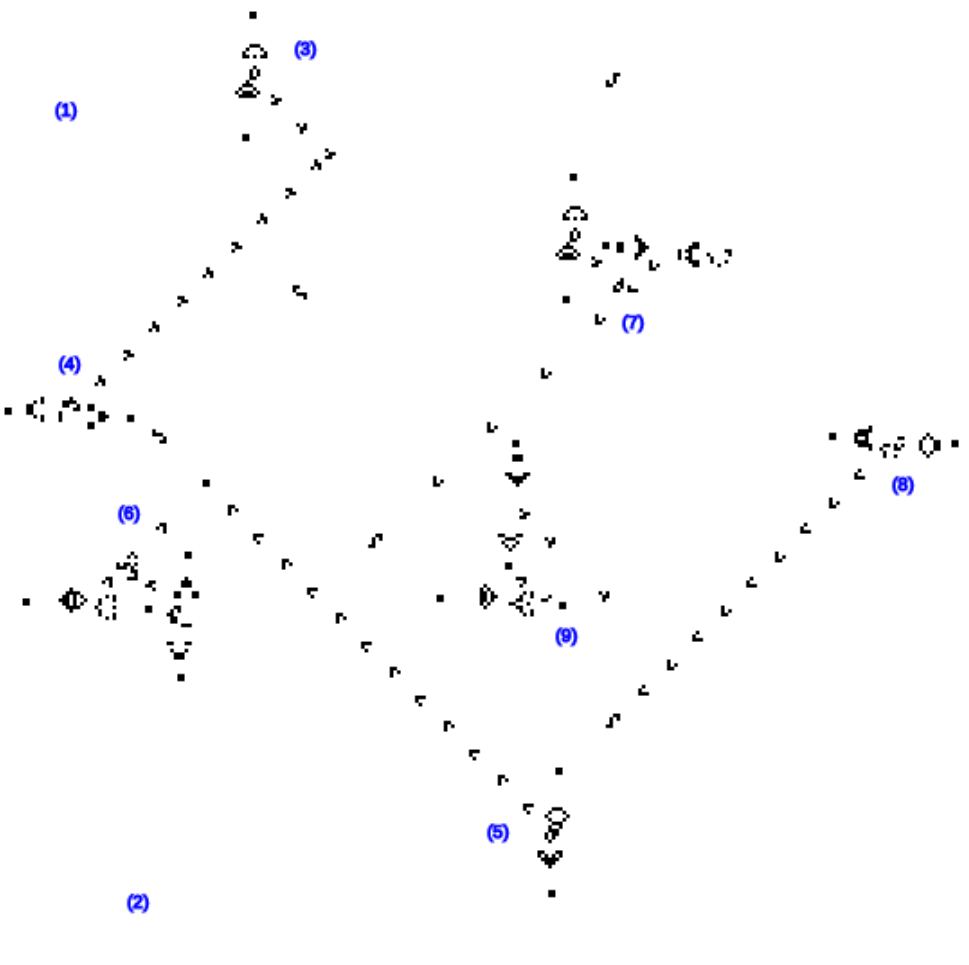
表面的には、制御の問題を解決するパターンをLifeの中で構築することは非常に難しく見えると思うのだが、実際はどうなのだろうか?Lifeのシミュレーターを最高速度に設定して遊んでみると、単純な初期状態の進化がいかに複雑だろうかがわかると思う。そして、進化するパターンにわずかでもランダムなノイズが加わると、例えば、「オン」に設定された1つの迷子の細胞があると、パターンの進化は急速に、そして劇的に変化する。従って、どのようなランダムなノイズに遭遇しても、全宇宙に展開し、目標とする状態を作り出すパターンを設計することは、非常に困難であると思われる。それなのに、次のような戦略が、実はもっともらしい解決策に思えるのは、驚くべきことだ。
制御の問題に答える一つの方法は、AIを作ることである。つまり、センサーで情報を収集し、世界についての仮説を立て、目標のために行動するような、生命の法則の下で進化する、×オン/オフ値の配列を見つけることができるかもしれないのである。AIに与える目標は、ゲームステップ後にグリッドの形状がスマイリー・フェイスに似るようにすることである。
初期状態が制御可能な領域でAIを構築するとはどういうことだろうか?それは、生命体の中に論理ゲートのような役割を果たす小さなパターンを組み立てることができ、そのパターンからコンピュータ全体を構築できることがわかったのである。例えば、ANDゲートの構造にはこんなものがある。
そして、こちらは整数を足し算する「Life」の中のコンピュータの拡大図である。

生命体内のコンピューターは、物理法則で計算できることは何でも計算できることが証明されている[1]から、生命体内でAIを構築することは可能かもしれない。AGIソフトウェアの作り方がまだ分かっていないだけでなく、AIには世界を認識し行動するための装置と、最終的にグリッド全体に影響を及ぼすようにするための移動・成長能力が必要になるからだ。「ライフ」内のほとんどの構造物は、摂動に対して非常に敏感である。例えば、上に示したコンピュータの構造は、進化の過程でほとんどすべての「オン」セルを「オフ」にすると、動作が停止する。制御の問題を解決するためには、ユーザーが制御できない領域のランダムなノイズを感知して反応するだけでなく、その領域からのグライダーの衝撃にも強いマシンを作る必要がある。
また、移動したり、時間とともに成長するような大きな機械を作ることは、生命にとって非常に非自明なことである。なぜなら、移動には、時間と共に異なる空間位置で自己再生できる機械が必要だからだ。もし、そのような機械が知覚し、考え、行動することを望むなら、これらの活動は自己再生する動きと同時に行われる必要がある。
したがって、制御の問いに対する肯定的な答えが、AIの構築という観点から与えられるかどうかは明らかではないが、そのような答えが与えられないということも明らかではない。制御の質問の真意は、AIが単に強力な部品の集合体ではなく、最初は小さくても最終的には全宇宙の大規模な構成を決定するパターンの許容性を示すものとして見ることができることを強調することにある。このような思考実験を、私たちの母国物理学ではなく生命で行う理由は、生命の物理学は非常に単純であり、私たちは生命において資源を集め、行動を起こす実体を見ることに慣れていないため、これらのパターンの基本的意義が、私たちの母国物理学の場合ほどには見過ごされにくいからだ。
意味合い
もし生命の内部にAIを構築することが可能なら、そして制御の問題に対する答えが肯定的なら、私たちは生命の基本的な力学について驚くべき事実を発見したことになる。具体的には、生命体には、グリッド全体の運命を決定するパターンが存在し、そのパターンが最初は小さな空間領域に限られていたとしても、それが決定されることが分かったのである。上記の設定において、私たちがコントロールできる領域は、グリッド全体の面積の1兆分の1にも満たない。残りのグリッドを初期化する方法はたくさんあるが、これらのセルの情報は、ユーザが制御する領域の少なくとも一部の情報と比較して、グリッドの最終的な構成にほとんど影響を与えないように運命づけられているようである[2]。
私たちは、AIを、最初は物理的に小さく、時間とともにその影響力を増していく存在として考えることに慣れている。なぜなら、人間は物理学の法則によって許容されており、人間も同じように時間とともに影響力を拡大する一般的な能力を持っているからだ。しかし、このような実体の許容性は、実体の構築を可能にするあらゆる世界の支配的な力学の深い特性であると私には思えるのだ。AIの許容性(または非許容性)は、物理学の深い特性である。
「ライフ」の内部に構築される可能性のあるパターンのほとんどは、グリッド全体の運命を左右するような拡張性を持っていない。グライダー銃にはこのような性質はない。孤独な論理ゲートにはこのような性質はない。そして、現実の世界で私たちが構築する可能性のあるパターンの多くも、この性質を持っていない。チェアには、宇宙全体を自分のイメージ通りに作り変えるような性質はない。それは単なるチェアなのだ。しかし、時間をかけて宇宙全体を作り変えていくようなパターンがあるかもしれない。このようなパターンを「AI」「エージェント」「オプティマイザー」と呼んだり、「インテリジェント」「ゴールディレクテッド」と表現することもできるが、これらはすべて、未来に影響を及ぼすこの深いパターンの本質を理解するためのフレームに過ぎない。
なぜなら、もしそのようなパターンが物理法則によって許されることが判明し、私たちがそれを構築したならば、それが宇宙のこの地域全体の長期的な構成を決定することになるかもしれないからだ。これらのパターンを理解することの重要性に比べれば、それ自体のためのエージェンシーや、それ自体のための知性、それ自体のための最適化を理解することは、比較的重要ではない。むしろ、これらは未来に影響を及ぼすこれらのパターンを理解するためのフレームであることを忘れてはならない。
しかし、それ以上に重要なことは、私たちがAIを研究するとき、物理学の深遠で基本的な性質を研究していることを忘れてはならないということである。それは、オーブントースターを作るようなものではない。オーブントースターは、何かをするための部品の扱いにくい集合体である。核分裂炉が核物理学の深遠かつ基本的な性質、すなわち核連鎖反応の許容性に触れるのと同じようにである。原子炉はそれ自体、扱いにくい部品の集合体だが、それを理解し、正しく設計するために最も重要なことは、それを構成する部品の詳細ではなく、それが触れる物理の基本的性質なのである。それはAIでも同じ状況である。私たちは、AIを構築するためのビットやピースではなく、これらの深遠なパターンの性質そのものに注目すべきなのである。
AI仮説
上記の思考実験では、次のような仮説が提案されている。
初期配置よりもはるかに大きな領域を最終的に支配する物理のパターンは、認識、認知、行動という、認識可能なAI的手段によってそうなる。
超新星の爆発などを「初期配置よりはるかに大きな領域を制御している」としないためには、そのようなパターンは、物質とエネルギーを任意の、しかし複雑度の低い形に配置することができることを要求したい。例えば、「生命」の巨大なスマイル・フェイスのように。
AIの定義としての「影響力
もしAI仮説が正しいとすれば、AIを物理学上のパターンとして定義することができるかもしれない。それは、最初は小さなものだが、その初期配置が最終的にはより大きな領域の形状に大きな影響を与えるというものである。これは、AIの定義として、知性に代わるものを提供することになる。AIの定義としての知能の問題は、知能が通常、あるエージェントが受け取った個別の観測と、それに対する行動の関数として測定されることである。しかし、生命の中で展開するパターンは、そのような明確に定義された入出力チャンネルを通じて世界と相互作用する必要はないし、私たちが本来持っている物理学上の構造物も、一般的にはそうではない。AIが世界に大きな影響を与えるためには、何らかの知性が必要だと思われるが、物理学の一般的なパターンの知性を定義することも自明ではないようだ。一方、制御の問題で定義される影響力は、任意の物理学のパターンに対して十分に定義されるが、ある物理学のパターンが最終的に大きな影響を与えるかどうかを効率的に予測することは困難かもしれない。
結論
この記事では、与えられた物理のもとで、最終的に大きな空間の領域の構成に大きな影響を与える小さなパターンを設定することが可能かどうかを問う制御の質問について説明した。この問いをコンウェイの「ゲームオブライフ」の文脈で考察し、この問いに対する肯定的な答えと否定的な答えのどちらが重要かを強調した。最後に、このような空間的な影響力を持つパターンは、ある意味でAIであることによって動作しているに違いないというAI仮説を提案した。
付録コントロールの質問に関する技術的な問題
コントロールの質問に対して、以下のような改良が必要と思われる。
- コンウェイのゲームオブライフには、先行する配置がないために決して生成できないパターンがある。これを扱うには、制御の問題を、一つの目標構成と完全に一致するのではなく、それに近い構成を作り出すという言葉で表現する必要がある。
- グリッド全体では通りの配置が可能だが、ユーザが制御する部分では通りの配置しか可能ではない。ユーザが制御する部分の各構成は、ちょうど1つの最終的な構成になる。つまり、可能な最終的な構成の大部分は到達できないことになる。この問題に対処するには、再び目標構成に近いという言葉で表現し、目標構成のコルモゴロフ複雑度が適度に低いことを確認する必要がある。
- 例えば、最終状態XになるパターンAと、別の最終状態YになるパターンBを見つけたとする。では、AとBを同じ初期状態、例えば宇宙の反対側からスタートさせたらどうなるだろうか?この場合、異なる目標を持った2つのAIが制御を競うことになるかもしれない。ランダムな初期化のごく一部にはAIが含まれるので、増幅の質問に対して無条件に肯定的な答えを出すことはおそらく不可能である。私たちは、この質問を洗練して、私たちの初期パターンが、周囲の宇宙のランダムな初期化の少なくとも1%において、望ましいゴール状態を生成しなければならないようにすることができる。
- ×セルの領域では、十分な大きさにならない場合がある。ライフのエンジニアリングは、多くのスペースを取る傾向がある。すべてのマイナンバーをスケールアップする必要があるかもしれない。