

Contents
Understanding Exercise Adherence: The Predictability of Past Experience and Motivational Determinants
www.ncbi.nlm.nih.gov/pmc/articles/PMC7071831/
オンラインで公開2020年2月12日
要旨
背景
過去の行動が運動の文脈におけるモチベーションパターンや将来の行動の安定性に及ぼす影響については、未解決の議論が続いている。理論家は、過去の行動が将来の行動に影響を与えると主張しているが、実証研究では、過去の行動が将来の行動の再発を予測する上で大きな力を発揮することが示されている。本研究では、過去の行動と動機決定要因が将来の運動アドヒアランスに及ぼす影響を検討することを目的とした。
方法
研究の対象としたのは、18~53 歳(M = 31.14,SD = 9.47)運動経験期間が 6~12 ヶ月(M = 9.41,SD = 1.33)のポルトガル人ジム・エクササイズ指導者 437 名(女性 235 名、男性 202 名)であった。参加者は、対人行動、基本的な心理的ニーズ、行動規則、および意志を測定する複数のセクションに分けた調査に記入した。過去の行動および将来の運動アドヒアランスのデータは、コンピュータ化されたジムへの出席記録を用いて収集された。結果
結果
認知された支持的行動、ニーズの満足度、自律的動機、意志、将来の運動アドヒアランスの間には、正の有意な相関関係が認められた。妨害行動、欲求不満、コントロールされたモチベーションでも同様の結果が得られた。回帰経路からは、認知された支援的行動、基本的なニーズの満足度、自律的モチベーションが将来の行動に正の有意な効果を示し、過去の行動が将来の運動アドヒアランスに最も高い係数を示したことが示された。フィットネスの専門家は、支援的な環境づくりを目指して、運動者からニーズを支える人として認識される可能性を高める必要がある。そうすることで、運動者は自律的なモチベーションを高め、将来のジムでの運動継続率を高めることができる。このように、運動者は過去のポジティブな運動経験を徐々に形成していき、将来的に運動に取り組む確率を高めていくことになる。
キーワード:対人行動、基本的欲求、行動調節、過去の行動、運動アドヒアランス
1. はじめに
運動不足は、罹患率や早期死亡のリスクが高い慢性疾患のパターンにつながる [1,2]。最近の調査によると、欧州人口の46%以上が身体活動をしておらず、これは以前の調査と比較して、座り仕事の多いライフスタイルが増加していることを示している [3,4]。ジムやヘルスクラブでの運動など、構造化された一貫した身体活動に従事する人の数は、ここ数年で減少している[5]。また、運動不足の主な原因の一つとしてモチベーションの欠如が指摘されており、現代社会ではほとんどの人が運動などの健康関連の行動をしたことがないと言われている[3]。
初期の段階では、運動への参加には、将来的に反復する可能性を高めるための努力と目的が必要である[6]。したがって、特定の期間にその行動を繰り返すことで、将来的に一貫した運動の実践につながる可能性がある[7]。しかし、過去の運動頻度が将来の行動に実際に影響を与えるかどうかについては、ほとんど知られていない[7]。本研究では、過去の行動の評価が、その予測力を動機付けの順序に統合することで、運動のアドヒアランスを説明するのに役立つことを提案する。
1.1. 運動の文脈における理論的枠組み
現代の様々な理論の中で、運動の文脈で最も研究されているフレームワークの一つが自己決定理論(Self-Decetermination Theory: SDT)[9]である[10]。このモデルでは、動機づけ要因を運動コミットメントなどの認知的・行動的成果のエージェントと考えている[11,12]。SDTの中心となるのは、自律的動機づけとは、個人的な選択と自律性の経験であり、人の行動が真の自分を表していると感じることである。SDTに基づいた運動のレビューでは、自律的動機付けは将来の運動への意欲や継続的な運動のアドヒアランスにプラスの有意な効果があることが示されているが、コントロールされた動機付けにはマイナスの効果があるようで、中途退会率の増加を表している[10,13]。
個人が将来の運動意欲をどのように調節するかは、3つの普遍的な基本的心理的ニーズ(BPN)の満足度や不満度に依存している[14]。このため、自律的動機づけのようなポジティブな結果を促進するためには、
- 自律性(すなわち、自発的な選択や自分の人生をコントロールしたいという感情)
- 能力(すなわち、支配や有効性の感情)
- 関連性(すなわち、他者とのつながりを感じる)
が満たされていなければならない[15]。一方で,個人は BPN の欲求不満を経験することもあり,その結果,病気になったり [16] ,やる気が抑制されて中退したり [17] などの否定的な結果になる可能性が高くなる。
BPN の満足度やフラストレーションのレベルは,個人が仲間や自分を取り巻く重要な立場にある人たち (コーチ,指導者,教師など) からの積極的な行動をどの程度受け止めているかに依存している。その結果、必要とされる支援的な行動 (例えば、個人的な選択の奨励、ポジティブなフィードバックの提供、感情的な支援の実証) は、運動家の BPN 満足度を促進する傾向がある [10,18]。対照的に,支配的・強引な行動(例えば,要求をして圧力をかけたり,罪悪感を強調したり,冷たくてよそよそしい行動を示す)を知覚すると,BPNフラストレーションなどの負の結果につながる [19,20]。
1.2. 意志と過去の行動
Ajzen [21]は、与えられた行動に対する個人の意志が、健康関連のアウトカムの最も近い予測因子であると仮定している[22]。しかし、運動の文脈での先行研究の結果から、認知的な構成要素の方が行動そのものよりも意志の分散を説明する傾向があることが示されている[23]。したがって、より強い意志が行動維持の増加を直接予測するわけではない。実際には、過去の研究[24,25]で示されているように、長期にわたって運動を行っている人は、意志への「依存度」が低く、代わりに過去の経験に頼って将来的にその行動を繰り返す可能性がある。
運動の文脈ではあまり研究されていないが、過去の経験は将来の行動の強力な予測因子であると指摘されている[24]。このアプローチは、過去の行動をより高いレベルで再現することで、将来、高いレベルのモチベーションや目的がなくても、その行動が繰り返される可能性が高まるという考えを裏付けるものである。HaggerとChatzisarantis [22]は、彼らのメタ分析の中で、過去の行動が将来の行動を予測するだけでなく、行動のパフォーマンスの動機的および認知的決定要因としても機能することを示している。したがって、過去の行動は、対人行動、BPN、モチベーションの認識を考慮すると、個人が将来どのくらいの頻度で運動するかに、より強い影響を与える可能性があるように思われる。
1.3. これまでの限界と今後の研究課題
過去の行動が将来の運動アドヒアランスに与える影響については、TPBとSDTの両方のフレームワークを考慮しても、その予測力は十分ではない[26]。これまでの研究の大半は他の運動の決定要因に焦点を当てていたため[27]、過去の行動が動機づけ要因、意志、将来の行動に与える影響についてはほとんど知られていない。単なる運動の発生が、運動者が将来的に運動を繰り返すことにどのような影響を与えうるのかをよりよく理解するためには、このような未研究の領域を発展させる必要がある。さらに、認知されたニーズ支援的行動が、基本的なニーズ、行動調節、意志を介して連続的に効果を発揮し、将来の運動実践に結びつくのか、あるいは、過去に繰り返された行動が将来の再発を実際にどのように予測するのか、という具体的かつ実践的な問題に取り組む必要がある。そこで、本研究の目的は、過去の行動と動機決定要因が将来の運動アドヒアランスに及ぼす予測力を分析することである。
2. 材料と方法
研究の対象としたのは、ポルトガルのジムやヘルスクラブで運動をしている18~53歳(M = 31.14,SD = 9.47)の437名(女性235名、男性202名)で、ポルトガルのジムやヘルスクラブで運動をしている人(n = 10名)のデータである。参加者の運動経験は6ヶ月から12ヶ月(M = 8.41; SD = 1.33)トレーニングの頻度は週2回から5回(M = 2.36; SD = 0.74)であった。
データ収集に先立って倫理委員会(参考番号:CE-UBI-pJ-2018-044:ID683)による倫理的承認を得ており、本研究で行われた手順は1964年のヘルシンキ宣言とその後の修正、または同等の倫理基準に従っていた。その後、複数のジムやヘルスクラブの経営者(n = 10)に連絡を取り、研究の目的を説明した。彼ら全員が研究者にデータ収集を進めることを許可した。ジムのフロントオフィスでは、ジムの会員候補者に連絡を取り、研究への参加を希望した。研究者は、以下の条件を満たしていると思われる方にアプローチした。年齢は 18 歳以上 65 歳未満、男女とも、特定のジムやヘルスクラブでの運動経験が 6 ヶ月以上 12 ヶ月未満であること。本研究で使用した 6 ヶ月以上 12 ヶ月未満の基準を適用した根拠は、既存の文献に基づいている。また、Prochaska and DiClemente [6]によると、退会率は最初の 6 ヶ月で約 50%であり、この期間以降は減少している。参加を希望する者は、複数のセクションの調査に記入する前に、インフォームド・コンセント用紙に署名した。インフォームド・コンセントは、この研究に参加したすべての人から得られた。ジムの管理者は参加者の選択に干渉しておらず、本研究への参加に対する報酬も与えていない。参加者は約20分で複数項目のアンケートに回答した。
2.1. 対策
知覚された対人行動
運動における対人行動調査票(ポルトガル語版)[29]を使用して、フィットネス指導者の行動に関して運動家が知覚した支持的行動と妨害的行動を評価した。この24項目(6因子、各4項目)の質問票は、知覚された必要性のある自律性、能力、および関連性のある支援と、知覚された必要性のある自律性、能力、および関連性のある阻止行動を測定する。参加者は、1(「全く同意しない」)から7(「完全に同意する」)までの7点満点の尺度を用いて、各文への同意を示した。その後、他の研究[30,31]で以前に行われたように、支持的行動と阻止行動の複合スコアが算出された。
基本的なニーズの満足度と欲求不満
運動中に運動者が経験する BPN の満足度と欲求不満を測定するために、Basic Psychological Needs Satisfaction, and Frustration Scale (ポルトガル語版) [32] を用いた。この24項目(6因子、各4項目)の尺度は、運動実践中の自律性、能力、関連性の満足感の経験と、自律性、能力、関連性の欲求不満の経験を測定するものである。参加者は、1(「全く同意しない」)から5(「全く同意する」)までの5段階の尺度で、各記述項目への同意度を示した。その後,先行研究 [31,33] にしたがって,BPN の満足度と欲求不満の複合スコアを算出した。
行動規制
行動規制運動質問票(ポルトガル語版) [34] を用いて,個人が運動に対する行動をどのように規制しているかを評価した。具体的には、これらの18項目からなる質問票を用いて、SDTの動機づけ連続体に基づいて、アモチベーション、外的調節、内発的調節、識別された調節、統合された調節、および内発的動機づけを測定した。回答の選択肢は0(”全く同意しない”)から4(”全く同意する”)までの範囲で、自律的動機付け(識別された調節と統合された調節、および内発的動機付け)と制御された動機付け(内発的調節と外発的調節、およびアモティベーション)の複合スコアは、以前の仮定に基づいて計算された [9,35]。
意志
我々は、運動遵守に対する意志を調べる3項目の因子を作成するというAjzen [36]の勧告に従った(例:「今後6ヶ月間、現在のように頻繁に運動を続ける」)。参加者は、1(「いいえ、確かにそう思う」)から5(「はい、確かにそう思う」)までの5段階のリッカート尺度を用いて各項目に回答した。
運動の遵守
ジムとヘルスクラブのコンピュータ記録を運動のアドヒアランスを測定するために使用した。ジムへの入場は、改札口でモニタリングされている。したがって、今回の研究では、ジムでの1回のエントリーは1回のトレーニングセッションとして扱われた。結果として、ジムに行く間に参加した活動の数は関係がなく、1回のトレーニングセッションとしてカウントされた。過去の経験(初回評価の6ヶ月前にジムに通った経験)と将来の運動アドヒアランス(初回評価の6ヶ月後にジムに通った経験)を分析の対象とした。同様の手順はすでに同じ文脈で使用されており [11]、著者らはジムへの出席記録を行動の観察可能な指標と考えている。
2.2. 統計的分析
データは外れ値についてスクリーニングされた。一変量(z > 3.00)および多変量(D2 = p1 < 0.001, p2 < 0.001)の外れ値は、Byrne [37]によって推奨されたように除外した。各変数について、平均(M)標準偏差(SD)歪度(S)クルトシス(K)および相関が計算された。複合信頼性(CR)係数はRaykov [38]式を用いて計算し,0.7以上の値は許容範囲とした [39]。
仮説化モデル(図1,図2,図3および図4)は、オブザベーションの非正規性および非独立性にロバストであるため、Mplus 7.4 [40]を用いて、ロバスト最尤(MLR)推定量を用いて分析された[41]。カイ二乗統計量(χ2)とそれらのそれぞれの自由度(df)は視覚指向について報告されたが、これらの尺度は標本サイズとモデル仕様に敏感であるため、モデル適合性を評価するためには検討されなかった [42]。CFAとSEMの受容性については、以下の絶対指数と増分指数が考慮された。比較適合指数(CFI)正規化適合指数(NLI)標準根平均残差(SRMR)および90%信頼区間(CI 90%)を持つ近似根平均二乗誤差(RMSEA)である。これらの指標については、CFIおよびTLI≧0.90,SRMRおよびRMSEA≦0.8のスコアが許容できると考えられた[37,43,44]。直接効果および間接効果は、標準化されたベータ係数とそのそれぞれの95%信頼区間(CI 95%)に従って分析され、信頼区間にゼロが含まれていない場合は有意であると認められた [45]。
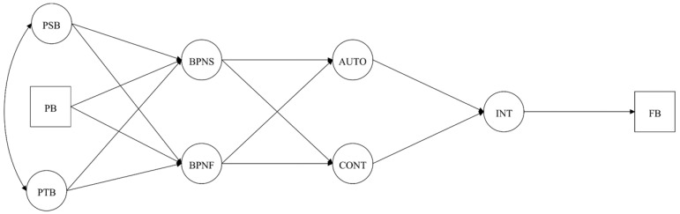
図1 過去の行動が知覚された支持的な行動と、知覚された対人関係行動を予測する仮説モデル

注:PSB=知覚された支持的な行動; PTB=知覚されたスワーティング行動; PB=過去の行動; B末梢神経系/F=基本的な心理学的ニーズの満足/欲求不満; AUTO=自律的動機付け; CONT=制御された動機付け; INT=意志; FB=未来の行動。
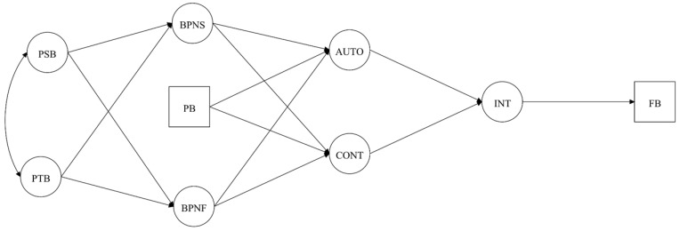
図2 過去の行動が基本的心理的ニーズの満足度と欲求不満を予測する仮説モデル
注:PB=過去の行動、PSB=知覚された支持的な行動、PTB=知覚されたスワーティング行動、B末梢神経系/F=基本的な心理的ニーズの満足・欲求不満、AUTO=自律的な動機、CONT=制御された動機、INT=意志、FB=未来の行動。
図3 過去の行動が自律的動機づけと制御された動機づけを予測する仮説モデル
注: PSB =知覚された支持的な行動; PTB =知覚された妨害的な行動; PB =過去の行動; B末梢神経系/F =基本的な心理学の必要性の満足/欲求不満; AUTO =自律的な動機; CONT =制御された動機; INT =意志; FB =未来の行動。
図4 過去の行動が意志と将来の行動を予測する仮説モデル
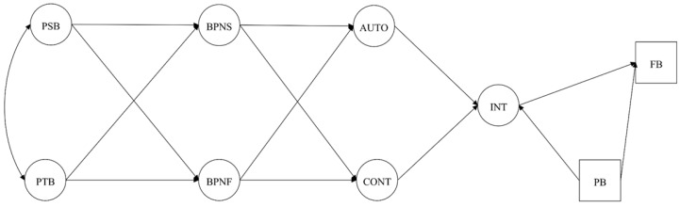
注: PSB =知覚された支持的な行動; PTB =知覚された妨害的な行動; B末梢神経系/F =基本的な心理学的な必要性の満足/欲求不満; AUTO =自律的な動機; CONT =制御された動機; INT =意志; PB =過去の行動; FB =未来の行動。
3. 結果
3.1. 予備分析
全体のサンプルからは、134人の参加者がいくつかの基準を満たしていなかったため、さらなる分析から除外された。年齢が 65 歳以上(n = 34)運動経験が 6 カ月未満(n = 54)および 12 カ月以上(n = 46)であった。単変量(n = 1)および多変量(n = 3)の外れ値がいくつか検出され、さらなる分析から除外された。記述統計量と相関関係を表1に示す。エクササイザーは、認知された支持的行動、BPN満足度、自律的動機付けのレベルが、認知されたスワーティング行動、BPNフラストレーション、コントロールされた動機付けと比較して高いと報告した。歪度と尖度のスコアがカットオフ値内に含まれていたので、結果は正規分布を示した。知覚的支持行動、BPN満足度、自律的動機は互いに正の有意な相関があり、知覚的スワーティング行動、BPNフラストレーション、コントロールされた動機とは負の相関があった。BPN満足度、自律的動機づけ、意志は正の相関があり、BPNフラストレーション、コントロールされた動機づけは、過去の行動や今後の運動アドヒアランスと負の相関があった。複合信頼性係数はカットオフ値を超えていた。
表1 記述統計、複合信頼性、相関行列
| M | SD | S | K | CR | 相関行列 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ||||||
| 1.知覚された支持的行動 | 5.02 | 0.79 | −0.18 | 0.04 | 0.80 | 1 | ||||||||
| 2.知覚される妨害行動 | 2.49 | 0.87 | 0.28 | −0.11 | 0.72 | −0.66 ** | 1 | |||||||
| 3.BPNの満足度 | 4.04 | 0.51 | −0.58 | 1.6 | 0.75 | 0.63 ** | −0.25 ** | 1 | ||||||
| 4.BPNフラストレーション | 1.80 | 0.57 | 0.74 | 0.41 | 0.76 | −0.46 ** | 0.58 ** | −0.81 ** | 1 | |||||
| 5.自律的な動機 | 3.32 | 0.49 | −0.57 | 0.46 | 0.77 | 0.52 ** | −0.35 ** | 0.56 ** | −0.54 ** | 1 | ||||
| 6.制御された動機 | 0.04 | 0.34 | 0.67 | −0.17 | 0.70 | −0.31 ** | 0.57 ** | −0.30 ** | 0.61 ** | −0.61 ** | 1 | |||
| 7.意志 | 4.46 | 0.71 | −1.58 | 2.21 | 0.94 | 0.27 ** | −0.23 ** | 0.37 ** | −0.30 ** | 0.45 ** | −0.35 ** | 1 | ||
| 8.過去の行動 | 69.52 | 29.74 | 0.67 | −0.02 | – | 0.10 ** | 0.07 | 0.11 * | −0.14 * | 0.28 ** | −0.17 ** | 0.21 ** | 1 | |
| 9.将来の運動順守 | 67.59 | 31.58 | 0.47 | −0.29 | – | 0.11 ** | 0.05 | 0.10 * | −0.10 * | 0.27 ** | −0.16 ** | 0.24 ** | 0.86 ** | 1 |
M = 平均; SD = 標準偏差; S = 歪度; K = クルトシス; CR = 複合信頼性; * p < 0.05; ** p < 0.01.
3.2. 主な分析
分析対象となったすべての仮説モデルの適合度指数の結果を表2
に示する。検証したモデルの中で、過去の行動を意志と将来の運動アドヒアランスの予測因子として考慮したモデル4(図4)は、許容できる適合性を示した唯一のモデルであった。そこで、モデル4を用いて直接的効果と間接的効果を評価した。理論的に仮定された通り、いくつかの有意な効果が観察された。すなわち、(i)知覚された支持的行動はBPNの満足度を正に予測し、(ii)知覚された妨害的行動はBPNのフラストレーションを正に予測し、(iii)BPNの満足度は自律的動機を正に予測し、(iv)BPNのフラストレーションは自律的動機と制御された動機を負に予測し、(v)自律的動機は正に予測されたが、制御された動機は運動に対する意志を負に予測し、(vii)意志と過去の行動は将来の行動を正に予測していた。詳細は表3を参照されたい。
表2 モデルフィット指数
| χ 2 | df | CFI | NFI | SRMR | RMSEA | 90%CI | |
|---|---|---|---|---|---|---|---|
| 図1 | 1209.663 * | 198 | 0.63 | 0.57 | 0.13 | 0.13 | 0.12、0.14 |
| 図2 | 1100.716 * | 197 | 0.67 | 0.61 | 0.09 | 0.12 | 0.11、0.13 |
| 図3 | 1091.767 * | 197 | 0.67 | 0.62 | 0.09 | 0.12 | 0.11、0.13 |
| 図4 | 456.379 * | 197 | 0.91 | 0.89 | 0.07 | 0.07 | 0.06、0.08 |
CFI = 比較フィット指数; NFI = 正規化フィット指数(NNFI); SRMR = 標準ルート平均残差; RMSEA = 近似のルート平均二乗誤差(RMSEA); * p < 0.01で有意
表3 構成要素間の回帰パス
| β | SE | CI95% | ||
|---|---|---|---|---|
| 下 | アッパー | |||
| 支持的な行動→BPNの満足度 | 0.72 | 0.20 | 0.38 | 0.89 |
| 支持的な行動→BPN欲求不満 | −0.31 | 0.19 | −0.63 | 0.02 |
| 妨害行動→BPN満足度 | 0.14 | 0.21 | −0.21 | 0.49 |
| 妨害行動→BPN欲求不満 | 0.41 | 0.20 | 0.08 | 0.74 |
| BPNの満足度→自律的な動機 | 0.36 | 0.12 | 0.16 | 0.56 |
| BPNの満足度→制御された動機 | 0.07 | 0.16 | −0.20 | 0.34 |
| BPNフラストレーション→自律的な動機 | −0.43 | 0.09 | −0.59 | −0.27 |
| BPNフラストレーション→制御された動機 | 0.73 | 0.13 | 0.52 | 0.94 |
| 自律的な動機→意志 | 0.36 | 0.08 | 16 | 0.56 |
| 制御された動機→意志 | −0.14 | 0.11 | −0.34 | −0.05 |
| 意志→将来の行動 | 0.04 | 0.02 | 0.04 | 0.08 |
| 過去の行動→意志 | 0.12 | 0.05 | 0.03 | 0.20 |
| 過去の行動→将来の運動順守 | 0.92 | 0.01 | 0.89 | 0.95 |
β=標準化係数、SE=標準誤差、CI95%=信頼区間(95%)
変数間のすべての可能な回帰経路の間接効果を表4に示す。知覚的支持行動は、BPN満足度と自律的動機づけを介して、意志と将来の行動に正の有意な効果を示した。一方、支援的な行動は、BPNのフラストレーションを介して、運動意志と将来の行動を否定的に予測した。BPN満足度は、自律的動機づけを介して将来の行動に正の有意な間接効果を示した。しかし,BPNフラストレーションは,意志と将来の行動に負の間接効果を示した。自律的動機と過去の行動は、意志を介して将来の運動遵守に間接的な効果を示した。
表4 構成要素間の間接パス。
| β | SE | CI95% | ||
|---|---|---|---|---|
| 下 | アッパー | |||
| 支持的な行動→BPNS→AUTO→INT→FEA | 0.09 | 0.01 | 0.04 | 0.18 |
| 支持的な行動→BPNS→CONT→INT→FEA | 0.01 | 0.01 | −0.01 | 0.03 |
| 支持的な行動→BPNF→AUTO→INT→FEA | −0.01 | 0.00 | −0.01 | 0.03 |
| 支持的な行動→BPNF→CONT→INT→FEA | 0.01 | 0.01 | −0.01 | 0.02 |
| 阻止行動→BPNS→AUTO→INT→FEA | 0.01 | 0.01 | −0.02 | 0.03 |
| 阻止行動→BPNS→CONT→INT→FEA | −0.02 | 0.01 | −0.13 | 0.09 |
| 阻止行動→BPNF→AUTO→INT→FEA | −0.11 | 0.00 | −0.31 | −0.09 |
| 阻止行動→BPNF→CONT→INT→FEA | −0.08 | 0.02 | −0.20 | −0.02 |
| 支持的な行動→BPNS→AUTO→INT | 0.10 | 0.05 | 0.02 | 0.17 |
| 支持的な行動→BPNS→CONT→INT | 0.05 | 0.04 | −0.01 | 0.11 |
| 支持的な行動→BPNF→AUTO→INT | −0.01 | 0.02 | −0.04 | 0.02 |
| 支持的な行動→BPNF→CONT→INT | 0.03 | 0.03 | −0.02 | 0.09 |
| 妨害行動→BPNS→AUTO→INT | 0.02 | 0.03 | −0.03 | 0.07 |
| 妨害行動→BPNS→CONT→INT | −0.07 | 0.04 | −0.13 | −0.01 |
| 妨害行動→BPNF→AUTO→INT | 0.00 | 0.00 | −0.01 | 0.01 |
| 妨害行動→BPNF→CONT→INT | −0.09 | 0.04 | −0.10 | −0.02 |
| 支持的な行動→BPNS→AUTO | 0.25 | 0.11 | 0.08 | 0.43 |
| 支持的な行動→BPNS→CONT | 0.05 | 0.07 | −0.15 | 0.25 |
| 支持的な行動→BPNF→AUTO | 0.13 | 0.09 | 0.02 | 0.29 |
| 支持的な行動→BPNF→CONT | −0.22 | 0.08 | −0.48 | −0.09 |
| 妨害行動→BPNS→AUTO | 0.05 | 0.12 | −0.07 | 0.17 |
| 妨害行動→BPNS→CONT | 0.01 | 0.03 | −0.04 | 0.07 |
| 妨害行動→BPNF→AUTO | −0.18 | 0.15 | −0.32 | −0.03 |
| 妨害行動→BPNF→CONT | 0.30 | 0.16 | 0.04 | 0.56 |
| BPNS→AUTO→INT→FEA | 0.11 | 0.02 | 0.02 | 0.21 |
| BPNS→CONT→INT→FEA | −0.02 | 0.01 | −0.01 | 0.01 |
| BPNF→AUTO→INT→FEA | −0.04 | 0.02 | −0.07 | −0.01 |
| BPNF→CONT→INT→FEA | −0.03 | 0.02 | −0.06 | −0.01 |
| BPNS→AUTO→INT | 0.14 | 0.05 | 0.05 | 0.23 |
| BPNS→CONT→INT | −0.01 | 0.02 | −0.05 | 0.03 |
| BPNF→AUTO→INT | −0.11 | 0.05 | −0.23 | −0.01 |
| BPNF→CONT→INT | −0.16 | 0.08 | −0.25 | −0.08 |
| AUTO→INT→FEA | 0.09 | 0.03 | 0.04 | 0.14 |
| CONT→INT→FEA | −0.04 | 0.03 | −0.08 | 0.01 |
| PB→INT→FEA | 0.10 | 0.01 | 0.02 | 0.19 |
β=標準化係数、SE=標準誤差、CI95%=95%での信頼区間
4. 議論
本研究の目的は、過去の行動とモチベーション決定要因が将来の運動アドヒアランスに及ぼす影響を調べることであった。具体的には、SDTに内在する動機づけ要因が過去の行動とどのように相互作用し、将来の行動を予測するのかについて新たな知見が得られた。得られた結果は、将来の運動維持を説明するものとなる可能性があり、先行研究と照らし合わせて議論することになる。
本研究では、これまでの理論的前提に基づいて 4 つの仮説モデルを検証した[22]。しかし、モデル4のみが許容できる適合性を示した。認知された対人関係行動、欲求満足度や欲求不満、行動調節にかかわらず、過去の行動の観察された効果は、将来の運動への意志と行動の実行を予測しているに過ぎないように思われる。その結果、過去の行動は動機決定要因の中和的な役割を果たしていないことが示唆された。その結果、運動経験のある人は長期的に安定した行動を示し、過去の行動が将来の行動の強い予測因子となっていることが示唆された。
知覚的なニーズ支持的行動は、BPN(心理的ニーズ)の満足度や自律的動機付けと有意な関連を示した。さらに,知覚されたニーズ支持的行動は,BPNのフラストレーションやコントロールされたモチベーションと有意な関係を示した。これらの結果は、動機決定要因の間に二重過程が存在することを前提とした、健康関連行動の理論的研究 [9] と実証的研究 [29,32,46] を支持するものである。自律的な動機付けは正の有意な効果を示したのに対し、コントロールされた動機付けは意志に対して負の有意な効果を示した。これらの結果は、Ntoumanisら[12]の結果と一致しており、自己決定された動機と喜びによって運動をしている人、運動を重要な行動と考えている人ほど、将来的にその行動を維持しようとする意思が強いことを示唆している。反対に、外部からの報酬を求めたり、強制的に運動させたりする人は、初回評価から6ヶ月後には運動に対する意思が弱くなっているようである。
意志は将来の運動アドヒアランスを正に有意に予測したが、過去の行動の予測力と比較すると、説明された分散は低くなった。実際、過去の運動行動は意思と比較して、将来の行動を最も強く予測していた。実際、先行研究[47]では、過去の行動をモデルに含めると、行動に対する意志の効果は過去の行動によって影響を受ける可能性が高いことが示唆されている。したがって、過去の行動がない場合には、意志は行動に直接影響を与え、動機付けは意志を通して間接的に行動に影響を与えるという仮説が立てられるかもしれないが、これは説明された分散に関する誤解を招く結論になるかもしれない。先行研究[24,25]で示されているように、一定期間にわたって運動をしている人は、意志への「依存度」が低く、代わりに過去の経験に頼って将来その行動を繰り返している可能性がある。この結果から明らかなように、過去の行動が将来の運動アドヒアランスに対する動機決定要因の効果を上書きする可能性があるように思われる。しかし、過去の行動が意志を介して将来の運動アドヒアランスに間接的に影響を与えることから、将来の運動アドヒアランスを促進するためには何らかの意志が必要であることが示唆された。したがって、個人が過去の経験から運動をしているように見えても、将来の運動に対するある程度の意志が媒介となっている可能性がある。
現在の研究結果によれば、その行動を一貫して繰り返すことで、将来的に運動の頻度が高まる可能性がある[28]。しかし、過去の運動頻度を得るためには、ジム利用者が運動を継続する意思をある程度経験する必要があり、これはモチベーションの「明るい」側面(知覚された必要性支援行動、BPNの満足度、自律的モチベーション)によって有意に予測される。経験的には、運動に従事する人は、BPN満足度、BPN満足度、自律的動機づけのレベルをそれぞれ高くするためには、フィットネスの専門家を支援的であると認識する必要がある(例えば、運動指導者からポジティブなフィードバックを受けたり、彼らとのつながりを感じたりする)。RyanとDeli [9]はこのことを理論的に証明しており、スポーツ[48]、体育[20]、運動[49]に関するいくつかの研究は、今回の結果と一致している。
結果は、モチベーションの「暗い」側面(知覚された挫折行動、BPNフラストレーション、コントロールされたモチベーション)が将来の運動行動に有意な負の間接効果を示すことを示した。「運動指導者にプレッシャーを感じているから今日は運動する」「運動指導者がいつも私の技術に文句を言っていて共感してくれないから明日は運動しない」というようなアンバランスな行動パフォーマンスは、運動への意欲を低下させ、最終的には離脱エピソードや脱落につながる可能性がある。過去の研究では、ニーズの阻止やニーズの制御行動をとる監督者(教師やコーチなど)は、BPNのフラストレーションの説明責任があると認識されていることが示されている [19,50]。このように、制御された形態のモチベーションとBPNフラストレーションは、運動者の行動に影響を与える外力や自己誘発的な力と関連しており、将来的にその行動を維持しようとする意思を低下させている可能性が高いと考えられる。
Lallyら[51]は、特定の合図(例えば、運動指導者に支持されていると感じること)に反応して、例えば運動するという行動を繰り返すことで、将来的にその行動のパフォーマンスを促進することができると提案している。しかし、必要とされる一貫性のレベルや、それが「習慣化」されるまでの期間については、十分に精査されていない。行動の安定性に関する研究[6,28]では、半年後には脱落の割合が約50%減少することが提案されている。今回の参加者のサンプルでは、運動経験が6ヶ月以上あった。このことから、過去の運動アドヒアランスによって運動への意欲が維持されている可能性がある。実際、過去の行動が将来の行動の85%を説明しており、これは先行研究[52]の結果を上回るものであった。現在の結果と過去の結果の違いは、関係する他のプロセスの意味合いが関係している可能性がある。1つの可能性としては、ジムやヘルスクラブで運動している人の過去の運動頻度のデータは、健康的な食事や献血、歯磨きなどの他の行動のデータよりも収集が容易である可能性が高いということが考えられる。ジムでの運動は、明確な準備の合図(例えば、ジムバッグを用意する、ジムまで車で移動する、徒歩で移動する)とパフォーマンス(例えば、体を鍛える、トレーニング計画に従う)が必要であるため、その繰り返しは過去の経験がどのようなものであったかに基づいている可能性がある。反対に、コップ一杯の水を飲むなどの他の行動は、準備の合図を必要とせず、その行動の容易さによって促進されるため、過去の経験や動機づけ要因への依存度が低い可能性がある[51]。それにもかかわらず、過去の行動や頻度(例えば、週に3回ジムに行くなど)だけでは、その行動がルーティンであるかどうかを判断するのに十分ではない。さらに、その行動がどのような状況で、あるいはどのような理由で行われているのかを知ることで、なぜ長期的に個人が運動をするのかについての理解が広がるかもしれない(例えば、ジムに行くことで何を目的としているのか?そして、なぜ私は今でも運動をしているのか?) したがって、モチベーションのような手がかりを理解することは、個人がなぜ定期的に運動をするのかを理解する上で最も重要なことである。その意志だけでは、将来的に無意識のうちに行動を繰り返すプロセスを開発するには十分ではないかもしれない。
本研究の強みは、運動行動を客観的に測定し、追跡調査を行ったことである。結果は、過去の行動が将来の運動行動に及ぼす予測値を、意志を介して直接的にも間接的にも確認している[24]。さらに、動機づけの前兆が将来の運動習慣を予測することを示すことで、Hagger[7]の今後の研究の展望を支持している。
限界と今後の研究課題
まず第一に、この研究はポルトガルの経験豊富な運動家のサンプルからのデータを考慮して、運動の文脈の中で実施された。したがって、これらの結果を他の領域に一般化することはできない。さらに、参加を拒否した潜在的な参加者はカウントされていない。彼らが本研究に参加していた場合、現在示されている結果とは異なる結果が得られた可能性がある。本研究のもう一つの限界は、追跡調査を伴う横断的アプローチが、過去の行動と動機決定要因に基づいて運動維持を説明することに限定されていることである。これらの結果を維持し、結果として効果的な介入を開発するためには、今後の無作為化比較試験の研究が必要である。
第二に、本研究では、共線性の問題を避けるために動機決定要因の複合スコアを用いているため、各構成要素の複合スコアに限定されている。さらに、異なる特徴を持つ運動家の間ではモチベーションが異なる可能性があるため、文化や年齢層などの人口統計学的パラメータが現在の結果に影響を与えている可能性がある[47]。したがって、今後の研究では、このモデルをより大規模なサンプルや文化的背景の異なるサンプルで検証することで、このギャップを埋める必要がある。現在の結果は、運動頻度が意志と将来の行動のモデレーターとしての役割を果たしている可能性を示唆しているが、習慣形成や行動自動性、過去と将来の行動予測、意志と行動の関係など、他の重要な側面の効果を検証することが、今後の研究のために推奨される。
5. 結論
健康的な生活を送るためには運動プログラムを始めることが重要であるにもかかわらず、社会人が長期的な運動参加を継続するための介入を行うことが重要である。現在の結果から、過去の行動が、意志を介して、その後の半年間の運動行動を直接的・間接的に予測することが示唆されている。
本研究は、個人が定期的にその行動を繰り返すように導く上でのニーズ支援的行動の関連する役割を証明し、健康推進者や研究者に、個人が将来的に身体活動的になるように促すためのいくつかの指針を提供するものである。
したがって、運動指導者からの支援を受けながら定期的に行動を繰り返すことは、長期的な運動アドヒアランスを促進するための好条件を生み出す可能性がある。